Project thesis topics 2010
The text below is a brief description of the topics given by professor Lars Imsland. Contact lars.imsland@itk.ntnu.no for further information. Most topics can be continued in a Master if the candidate and supervisor(s) so wishes.
- Dynamic positioning systems in arctic environments
Several assignments are available in connection with a research project on development of technology for dynamic positioning in arctic environments. Supervisors and co-supervisors will be one or more of professor Lars Imsland, professor Roger Skjetne, IVT (IMT), professor Thor I. Fossen. Possible tasks are:- Control of Unmanned Aerial Vehicles (UAVs) for measuring ice properties in the arctics
- Control of unmanned helicopters for support to ice management
- Observer design for ice motion
- Online observability/identifiability analysis and regularization in moving horizon observers
- Modellering og regulering av boreslamprosess
Medveiledere: John-Morten Godhavn, Statoil Forskningssenter, Rotvoll og Gerhard Nygaard, IRIS, Bergen.- Bakgrunn: Automatisering av boreprosessen er høyt prioritert av oljeselskaper. I dag er det en mudingeniør som blander boreslam, tar labprøver og analyserer returstrøm. Oppgaven går ut på å vurdere hvordan dette kan automatiseres. Tre parametere som er spesielt viktig er tetthet, viskositet og rate. Trykket nede i brønnen må holdes lavt nok for å unngå tap av boreslam ut til formasjonen og høyt nok til å unngå innstrømning av hydrokarboner mens man borer. Boreslammet skal transportere ut faste partikler (cuttings). Man kan anta at viskositet og tetthet for boreslam både inn og ut av brønnen måles.
- Målsetting: Første del av oppgaven går på modellere slamsystemet med brønn og tanker topside med tanke på automatisering. En slik modell må kunne gjenskape de forsinkelser som ligger i systemet. Andre del av oppgaven går ut på å designe en regulator som automatisk justerer boreparametrene basert på en modell og tilbakekobling fra målinger. Regulatoren skal testes med simuleringer. En mulig løsning er MPC.
- Modelling, simulation and control of a future compact separation process
Co-supervisor: Gisle Otto Eikrem, Statoil Forskningssenter, Rotvoll.- Background The process to be studied is a future subsea compact separation system, to be used at deep waters. The system will separate gas and liquid from the wells at the seabed and boost the gas and liquid up to the surface by use of a compressor and a pump. Since this system is much more compact than traditional separation processes, an advanced process control system is required. This will be a challenging and informative project work where the candidate will be given the opportunity to work in an ongoing technology development project with process modelling, programming, dynamic simulation and advanced process control.
- Objective The project work will cover model upgrade of an existing compact separation process simulator, which is controlled by a model predictive controller (MPC). The existing control system has proved its ability to control the process when small process disturbances are introduced. This project will investigate how such a system can be started up and shut down. Startup and shut down can be viewed as large disturbances for the process. The programming languages to be used are C++ and Matlab. Statoil’s internal MPC tool Septic will be used for process control. Outline of work:
- Upgrade the dynamic model of the compact separation process.
- Propose a startup sequence and shut down sequence for the process.
- Implement the sequences in the dynamic simulator and perform dynamic simulations.
- Optimize the control system to improve the startup and shut down of the process.
- Write a report.
- Observer design for a compact separation process
Co-supervisor: Gisle Otto Eikrem, Statoil Forskningssenter, Rotvoll.- Background A future subsea compact separation system, to be used at deep waters, is under development. The system will separate gas and liquid from the wells at the seabed and boost the gas and liquid up to the surface by use of a compressor and a pump. Since this system is much more compact than traditional separation processes, an advanced process control system is required. A laboratory test unit of this system has been developed and will be used as process in this project work. A dynamic simulator of this process is available with a nonlinear model predictive controller implemented (NMPC). To be able to use NMPC it is required to update the process model by use of measurements from the real process, this requires the implementation of an observer. This will be a challenging and informative project work where the candidate will be given the opportunity to work in an ongoing technology development project with programming, dynamic simulation and advanced process control.
- Objective The candidate is to develop an observer (state estimator) for the laboratory test facility. Different types of observers should be evaluated to estimate the states. The extended kalman filter (EKF) and the moving- horizon estimation (MHE) are two observers to be evaluated. The compact process system requires a high speed MPC solution which makes computation time a significant aspect. The programming languages to be used are C++ and Matlab. Statoil’s internal MPC tool Septic will be used for process control. Outline of work:
- Literature study on observers for nonlinear processes/models.
- Implements the preferred observers.
- Evaluate the performance of the control system with the different observers applied.
- Write a report.
- Regulering av multi-terminal HVDC-nett
Medveileder: Professor Kjetil Uhlen, Elkraft
Flytende vind-turbiner plassert offshore er et lovende konsept for fornybar kraftproduksjon. Samtidig produserer i dag offshore olje- og gass-plattformer kraft ved gass-turbiner, som medfører store utslipp av CO2. Teknologien multi-terminal HVDC er en mulighet for å koble offshore vindkraft-produksjon i nett med offshore olje- og gass-plattformer, med forbindelse til (et eller flere) land-nett. Terminalene må reguleres slik at det er effekt-balanse i nettet, og spenningen holdes konstant. Stabilitet og ytelse av reguleringen av hver enkelt av terminalene, og overordnet regulering av effekt og spenning i hele nettet, bør være robust mot at enkelte terminaler faller ut, og også kommunikasjons-begrensninger og –bortfall (pga store avstander). Elementer i oppgaven kan være:- Beskrive/forstå prosessen.
- Implementere hensiktsmessig modell i Matlab.
- Diskuter/definer reguleringsmål, utfordringer. Foreslå pådragsvariable og regulerte variable.
- Foreslå hensiktsmessig regulerings-strategi. «Distribuert MPC» kan være en mulighet.
- Implementere, simulere, diskutere.
- Advanced Process Control of an Oxygen-Membrane-based Gas Turbine Power Plant
The gas turbine power plant shown in the figure below shall be analyzed in terms of potential start-up and shut-down procedures using feedback control and/or model predictive control methods. Operational as well as material constraints of critical process components need to be considered. Co-supervisor: Post.Doc. Konrad Eichhorn, IVT (EPT).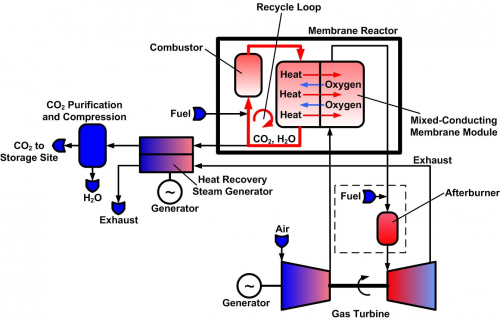
- Techniques for efficient covariance propagation in the Extended Kalman Filter based on model reduction
Even though the (recursive) EKF is considered an efficient algorithm for state estimation, it can still be computationally expensive for large/complex systems. The bulk of the complexity stems from the propagation of the state covariance matrix. In this task, the student will consider using techniques from model reduction to make the covariance propagation more efficient, while the full model still is used for state propagation. - Implementation and comparison of methods for sensitivity integration for gradient calculation in nonlinear MPC
Practical implementation of analytical gradient-computation for 'single-shooting' non-linear MPC is usually based on sensitivity integration. The candidate should implement/compare different methods for sensitivity integration (including the algorithm of Schlegel et al (2004)), and assess their usefulness and appropriateness for different types of single-shooting NMPC problems. - Parallelization in nonlinear MPC
Implementation of nonlinear MPC can benefit from parallelization. The candidate should explore strategies for parallelization, and make prototype implementations for assessment and comparison. - Implementation of framework for nonlinear MPC based on open-source components
The candidate should investigate open-source components that fit into a framework for nonlinear MPC. Relevant components might be for modeling, model code-generation, and optimization.
